 中国3D打印网
中国3D打印网终结者变成现实!利用可变形液态金属纳米粒子实现 4D打印混合软机器人
近年来,软机器人技术作为一个迅速扩展的前沿研究领域而兴起,它从自然界中柔软生物的运动机制中汲取灵感,以实现平滑和复杂的运动,适用于各种应用。然而,由于材料选择的限制和传统制造方法涉及的复杂多步骤过程,制造具有混合结构的软机器人仍然面临挑战。

有鉴于此,来自澳大利亚昆士兰大学的Ruirui Qiao等团队引入了一种新颖的直接一步式增材制造(3D打印)方法,用于制造由柔软和刚性组件组成的混合机器人,以完成复杂的任务。
本文要点:
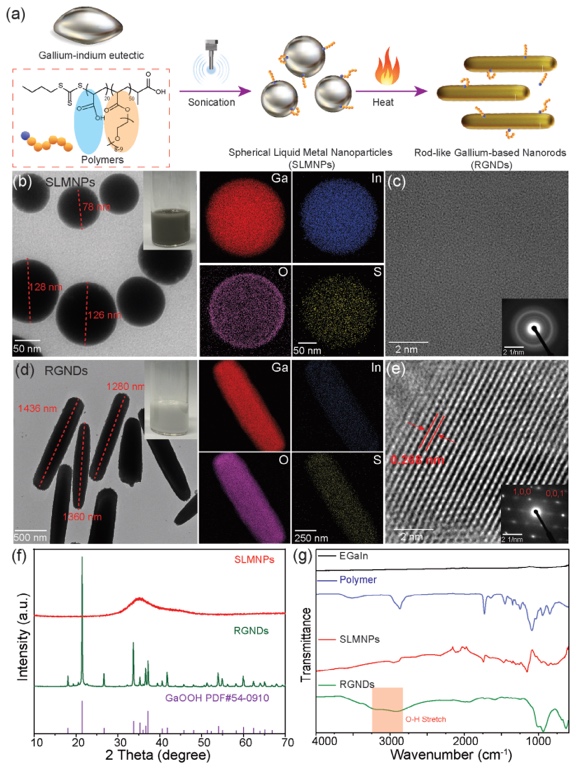
(1)受到可变形液态金属纳米颗粒(LMNPs)的启发,通过将不同形状的镓基纳米颗粒(GNPs)整合到3D打印聚合物中,开发了一个具有可调机械性能和可变形性的功能材料工具包。
(2)然后,通过一种单配方的GNPs集成墨水,展示了组装或一体式混合软-硬机器人的直接打印。(3)这种制造方法能够在机器人身体的混合结构中精确控制机械性能和形状记忆特性,并定制结构设计。通过设计和制造作为高精度夹持器、仿生马达和手部康复装置的混合机器人,进一步展示了它们的功能。
文章来源:https://doi.org/10.1002/adma.202409789
来源:EFL生物3D打印与生物制造
版权声明
本站部分文章来源于网络,如有侵权请联系删除!。
文章观点并不代表本站观点,请谨慎对待。
相关文章






发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。